
 产品:125
产品:125
 联系我们
联系我们

垂直直串联结构
工业机器人关节和连杆的结构有笔直串联、水平串联、并联等多种形式,每一节都是由一台伺服电机或者多台伺服电机通过减速器进行驱动。如果将机器人一步步分解,她就是由若干台伺服电动机经减速器减速后,由驱动运动部件的机械运动机构的叠加和组合﹔不同结构的机器人,实质上也仅仅机械运动机构和组合形式上的不同。
简绍笔直串联是工业机器人常见的形状之一,被广泛用于加工、搬运、装配、包装等场合。笔直串联机器人的结构与承载能力有关,机器人本体的常用结构有以下几种
1.电动机内置前驱结构
小标准、轻量级6轴笔直串联机器人经常采用图 3.1-1所示的电动机内置前驱根本结构。这种机器人外形简练、防护性能好﹔传动系统结构简略、传动链短、传动精度高,是小型机器人常用的结构。ABB机器人配件
6轴笔直串联机器人的运动首要包含腰反转轴s ( j1)、下臂摇摆轴L(j2)、上臂摇摆轴U(j3)及手腕反转轴R (j4)、腕摇摆轴B(j5)、手反转轴T(j6);每一运动轴都需求有相应的电动机驱动。交流伺服电动机是现在常用的驱动电动机,具有恒转矩输出特性,其高转速一般为3000~6000r/min,额定输出转矩一般在30N ·m 以下。由于机器人关节反转和摇摆的负载惯量大、反转速度低(一般为 25~100r/min),加减速时的大转矩需求到达数百甚至数万N·m。为此,机器人的所有反转轴,原则上都需求配套结构紧凑、承载能力强、传动精度高的大比例减速器,以下降转速、进步输出转矩。RV减速器、谐波减速器是现在工业机器人中常用的两种减速器,是工业机器人***为关键的机械核心部件本书后述的内容中将对其进行具体阐述。
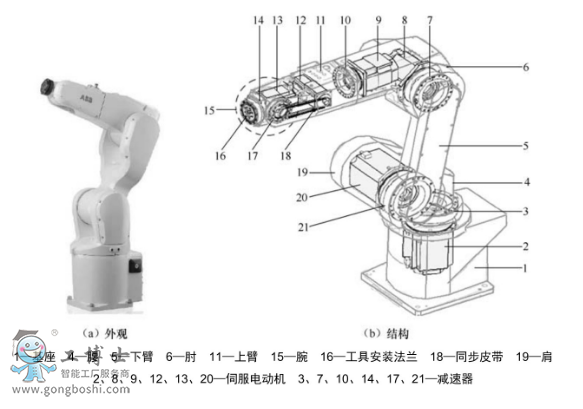
在图3.1-1所示的根本结构中,机器人的一切驱动电动机均布置在机器人罩壳内部,故称为电动机内置结构﹔而手腕反转、腕摇摆、手反转的驱动电动机均安装在手臂前端,故称为前驱结构。
2电动机外置前驱结构
选用电动机内置结构的机器人具有结构紧凑、外观整洁、运动灵活等特色,但驱动电动机的安装空间受限、散热条件差、修理保护不方便。此外,因为手反转轴的驱动电动机直接安装在腕摇摆体上,传动直接、结构简单,但会添加手腕部件的体积和质量,影响手运动的灵活性,因而一般只用于6kg以下小标准、轻量级机器人中。
机器人的腰反转、上下臂摇摆及手腕反转轴的惯量大、负载重,对驱动电动机的输出转矩要求高,需求大标准电动机驱动。为了保证驱动电动机有满足的安装、散热空间,方便修理保护,承载才能大于6kg的中小型机器人一般需求选用图3.1-2所示的电动机外置前驱结构。
在图3.1-2所示的机器人上,机器人的腰反转、上下臂摇摆及手腕反转轴驱动电动机均安装在机身外部,其安装、散热空间不受限制,故可进步机器人的承载才能,方便修理保护。

电动机外置前驱结构的腕摆动轴B( j5)、手回转轴T (j6)的驱动电动机同样安装在手腕前端(前驱),但是,其手回转轴T (j6)的驱动电动机也被移至上臂内腔,电动机通过同步带、伞齿轮等传动部件,将驱动力矩传送至手回转减速器上,从而减小了手腕部件的体积和质量。因此,它是中小型垂直串联机器人应用广的基本结构,本书将在后述的内容中对其内部结构进行详细剖析。
3.手腕后驱结构
大中型工业机器人对作业范围、承载能力有较高的要求,其上臂的长度、结构刚度、体积和质量均大于小型机器人,此时,如采用腕摆动、手回转轴驱动电动机安装在手腕前端的前驱结构,不仅限制了驱动电动机的安装散热空间,而且手臂前端的质量将大幅增加,上臂摆动轴的重心将远离摆动中心,从而导致机器人重心偏高,运动稳定较差。为此,大中型垂直串联结构工业机器人通常采用图3.1-3所示的腕摆动、手回转轴驱动电动机后置的后驱结构。
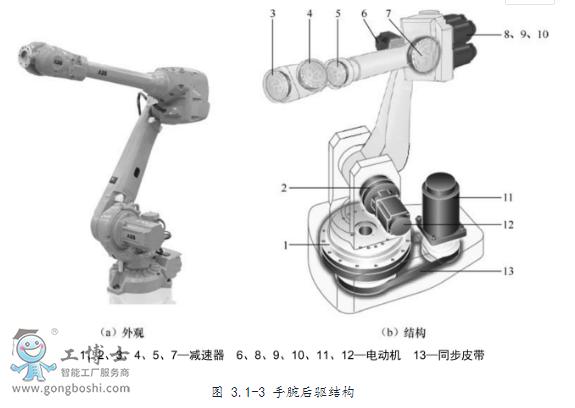
3.1-3手腕后驱结构
在手腕后驱结构的机器人上,手腕回转轴R ( j4)、弯曲轴B(j5)及手回转轴T ( j6)的驱动电动机8、9、10 并列布置在上臂后端,不仅可增加驱动电动机的安装和散热空间,便于大规格电动机安装,而且还可大幅度降低上臂体积和前端质量,使上臂重心后移,从而起到平衡上臂重力、降低机器人重心、提高机器人运动稳定性的作用。
后驱垂直串联机器人的腰回转、上下臂摆动轴结构,一般采用与电动机外置前驱机器人相同的结构,驱动电动机均安装在机身外部,因此,这是一种驱动电动机完全外置的垂直串联机器人典型结构,在大中型工业机器人上应用广泛。
在图3.1-3所示的机器人上,腰回转轴s (j1)的驱动电动机采用的是侧置结构,电动机通过同步皮带与减速器连接,这种结构可增加腰回转轴的减速比,提高驱动转矩,并方便内部管线布置。为了简化腰回转轴传动系统的结构,实际上,机器人也经常采用驱动电动机和腰回转同轴布置、直接传动的结构形式,有关内容可参见后述。
手腕后驱结构的机器人需要通过上臂内部的传动轴将腕弯曲、手回转轴的驱动力传递到手腕前端,其传动系统复杂,传动链较长,传动精度相对较低。
4.连杆驱动结构
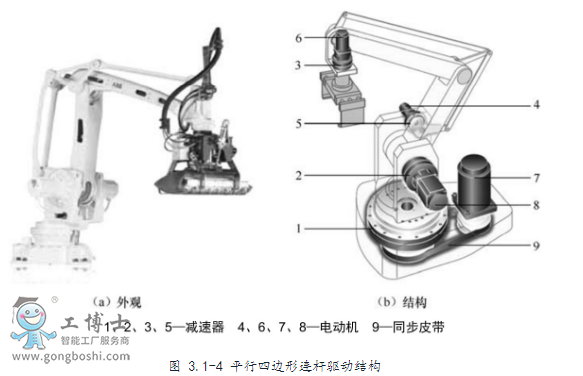
大型、重型工业机器人多用于大宗物品的搬运、码垛等平面作业,其手腕通常无须回转,但对机器人承载能力、结构刚度的要求非常高,如果采用通常的电动机与减速器直接驱动结构,就需要使用大型驱动电动机和减速器,从而大大增加机器人的上部质量,机器人重心高,运动稳定性差,为此需要采用图3.1-4所示的平行四边形连杆驱动结构。
采用连杆驱动结构的机器人腰回转驱动电动机以侧置的居多,电动机和减速器间采用同步皮带连接;机器人的下臂摆动轴驱动一般采用与中小型机器人相同的直接驱动结构。但是,其上臂摆动轴U (j3)、手腕弯曲轴B( j5)的驱动电动机及减速器,均安装在机器人腰身上﹔通过两对平行四边形连杆机构,驱动上臂摆动、手腕弯曲运动。
3.1-4平行四边形连杆驱动结构
采用平行四边形连杆驱动的机器人,不仅可加长上臂摆动、手腕弯曲轴的驱动力臂,放大驱动电动机转矩,提高负载能力,而且还可将上臂摆动、手腕弯曲轴的驱动电动机、减速器的安装位置下移至腰部,从而大幅减轻机器人的上部质量,降低重心,增加运动稳定性。但是,由于结构限制,在上臂摆动、手腕弯曲轴同时采用平行四边形连杆驱动的机器人,其手腕的回转运动(R轴回转)将无法实现,通常只能采用无手腕回转的5轴垂直串联结构;部分大型、重型搬运、码垛作业的机器人,甚至同时取消了手腕回转轴R(j4)、手回转轴T ( j6),成为只有腰回转和上下臂、手腕摆动的4轴结构。
采用4轴、5轴简化结构的机器人,其作业灵活性必然受到影响。为此,对于需要有6 轴运动的大型、重型机器人,有时也采用图3.1-5所示的仅上臂摆动采用平行四边形连杆驱动的单连杆驱动结构。
3.1-5单连杆驱动结构
仅上臂摆动采用平行四边形连杆驱动的机器人,具有通常6 轴垂直吕联机器人同样的运动灵活性。但是,由于大型、重型工业机器人的负载质大,为了平衡上臂负载,平行四边形连杆机构需要有较长的力臂,从而导至下臂、连杆所占的空间较大,影响机器人的作业范围和运动灵活性。为此大型、重型机器人有时也采用图3.1-5 (b)所示的带重力平衡气缸的连t驱动结构,以减小下臂、连杆的安装空间,增加作业范围和运动灵活性。
更多ABB机器人配件资讯欢迎点击咨询:ABB机器人配件
- 下一篇:机器人出现故障如何保障工作量
- 上一篇:ABB机器人|机器人的分类方法