

 СЊЯЕЮвУЧ
СЊЯЕЮвУЧ

ЁЁЁЁABBЛљДЁжЊЪЖ7ЃКABBЛњЦїШЫЛљБОИХФю
ЁЁЁЁЛЊзаЃКжТСІгкЮЊбЇЯАABBЛњЦїШЫгыЛњЦїЪгОѕЕФЭЌЕРжаШЫЬсЙЉИіШЫЕФОбщЃЌЫљаДЮФеТЖрЮЊбЇЯАгыаЫШЄЫљжТЃЌШєгаВЛзужЎДІЃЌЛЙЧыЖСепЖрЖрАќКЁЃ
ЁЁЁЁбЇЯАФкШнЃК
ЁЁЁЁ1 ЛњЦїШЫЙЄзїФЃЪН
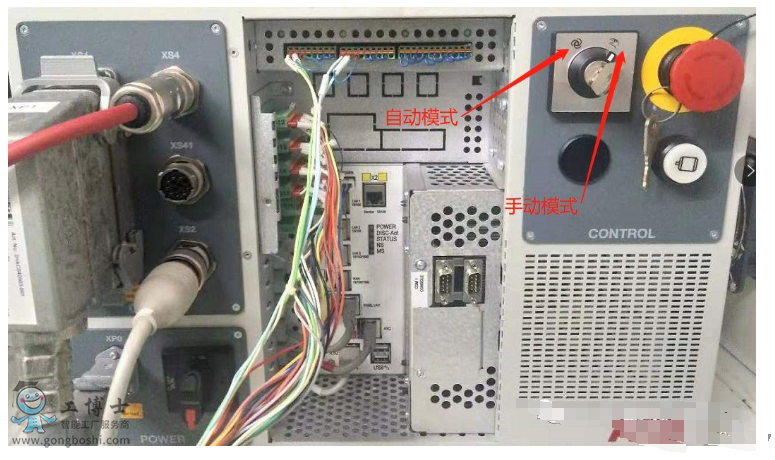
ЁЁЁЁ2 ЛњЦїШЫЖЏзїФЃЪН
ЁЁЁЁ3 дЫЖЏВЮПМзјБъЯЕ
ЁЁЁЁ1 ЛњЦїШЫЙЄзїФЃЪН
ЁЁЁЁABBЛњЦїШЫЙЄзїФЃЪНЗжЮЊЪжЖЏФЃЪНКЭздЖЏФЃЪНСНжжЁЃ
ЁЁЁЁ1.ЪжЖЏФЃЪНЃК
ЁЁЁЁжївЊгУгкЕїЪдШЫдБНјааЯЕЭГВЮЪ§ЩшжУЁЂБИЗнгыЛжИДЁЂГЬађБрМЕїЪдЕШВйзїЃЌдкЪжЖЏМѕЫйФЃЪНЯТЃЌдЫЖЏЫйЖШЯожЦдк 250 mm/sЯТЃЌвЊМЄЛюЕчЛњЩЯЕчЃЌБиаыАДЯТЪЙЖЏАДХЅЁЃ
ЁЁЁЁ2.здЖЏФЃЪНЃК
ЁЁЁЁжївЊгУгкЙЄвЕздЖЏЛЏЩњВњзївЕЃЌДЫЪБЛњЦїШЫЪЙгУЯжГЁзмЯпЛђепЯЕЭГI/OгыЭтВПЩшБИНјаааХЯЂНЛЛЅЃЌПЩвдгЩЭтВПЩшБИПижЦдЫааЁЃ
ЁЁЁЁ2 ЛњЦїШЫЖЏзїФЃЪН
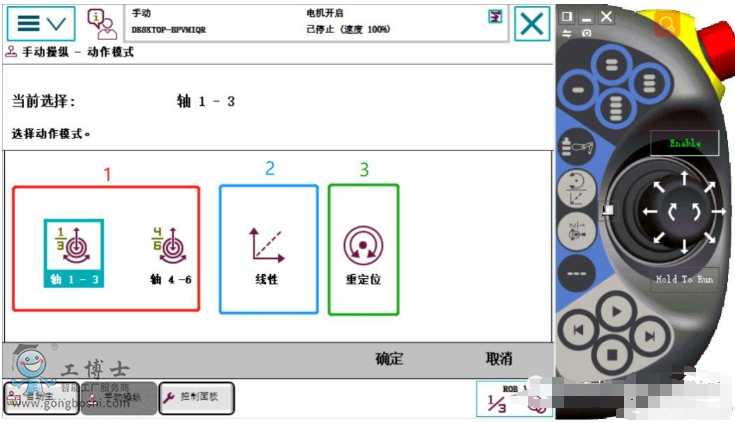
ЁЁЁЁЖЏзїФЃЪНгУгкУшЪіЪжЖЏВйзнЪБЛњЦїШЫЕФдЫЖЏЗНЪНЃЌЖЏзїФЃЪНЗжЮЊШ§жжЁЃ
ЁЁЁЁ1.ЕЅжсдЫЖЏЃК
ЁЁЁЁгУгкПижЦЛњЦїШЫИїжсЕЅЖРдЫЖЏЃЌЗНБуЕїећЛњЦїШЫЕФЮЛзЫЁЃ
ЁЁЁЁ2.ЯпаддЫЖЏЃК
ЁЁЁЁгУгкПижЦЛњЦїШЫдкбЁдёЕФзјБъЯЕПеМфжаНјаажБЯпдЫЖЏЃЌБугкЕїећЛњЦїШЫЕФЮЛжУЁЃ
ЁЁЁЁ3.жиЖЈЮЛдЫЖЏЃК
ЁЁЁЁгУгкПижЦЛњЦїШЫШЦбЁЖЈЕФЙЄОпTCPНјааа§зЊЃЌБугкЕїећЛњЦїШЫЕФзЫЬЌЁЃ
ЁЁЁЁ2.1 ЖЏзїФЃЪНЧаЛЛЗНЗЈ

ЁЁЁЁ1.ЭЈЙ§ЪжЖЏВйзнНчУцЯТЕФЖЏзїФЃЪНбЁдёНчУцНјааЧаЛЛЁЃ
ЁЁЁЁ2.ЭЈЙ§ПьЫйЩшжУВЫЕЅжаЛњаЕЕЅдЊЯТЕФЖЏзїФЃЪННчУцЧаЛЛЁЃ
ЁЁЁЁ3.ЭЈЙ§ЪОНЬЦїЩЯЕФЖЏзїФЃЪНЧаЛЛАДМќНјааПьЫйЧаЛЛЁЃ
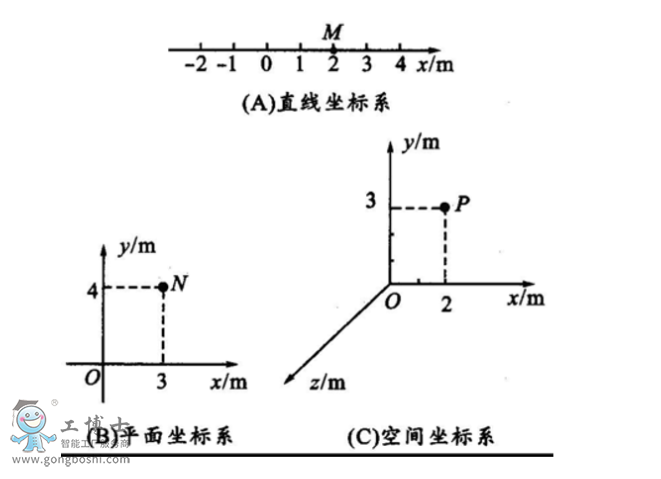
ЁЁЁЁ3 дЫЖЏВЮПМзјБъЯЕ
ЁЁЁЁПеМфжБНЧзјБъЯЕЮЊвдвЛИіЙЬЖЈЕуЮЊдЕу0,Й§дЕузїШ§ЬѕЛЅЯрДЙжБЧвОпгаЯрЭЌЕЅЮЛГЄЖШЕФЪ§жсЫљНЈСЂЦ№ЕФзјБъЯЕШ§ЬѕЪ§жсЗжБ№ГЦЮЊXжсЁЂYжсКЭZжсЃЌЭГГЦЮЊзјБъжсЁЃ
ЁЁЁЁАДееИїжсжЎМфЕФЫГађВЛЭЌЃЌПеМфжБНЧзјБъЯЕЗжЮЊзѓЪжзјБъЯЕКЭгвЪжзјБъЯЕЃЌЛњЦїШЫЯЕЭГжаЪЙгУЕФзјБъЯЕЮЊгвЪжзјБъЯЕЃЌМДгвЪжЪГжИжИЯђXжсЕФе§ЗНЯђЃЌжажИжИЯђYжсЕФе§ЗНЯђЃЌФДжИжИЯђввжсЕФе§ЯђЁЃ
ЁЁЁЁЛњЦїШЫЯЕЭГжаДцдкЖржжзјБъЯЕЃЌЗжБ№ЪЪгУгкЬиЖЈРраЭЕФвЦЖЏКЭПижЦЁЃ
ЁЁЁЁ1.ДѓЕизјБъЯЕЃК
ЁЁЁЁДѓЕизјБъЯЕПЩЖЈвхЛњЦїШЫЕЅдЊЃЌЫљгаЦфЫћЕФзјБъЯЕОљгыДѓЕизјБъЯЕжБНгЛђМфНгЯрЙиЃЌЪЪгУгкЪжЖЏПижЦвдМАДІРэОпгаШєИЩЛњЦїШЫЛђЭтжсвЦЖЏЛњЦїШЫЕФЙЄзїеОКЭЙЄзїЕЅдЊЁЃ
ЁЁЁЁ2.ЛљзјБъЯЕЃК
ЁЁЁЁдкЛњЦїШЫЛљзљжаШЗЖЈЯргІЕФСуЕуЃЌЪЙЕУЙЬЖЈАВзАЕФЛњЦїШЫвЦЖЏОпгаПЩдЄВтадЃЌвђДЫ***ЗНБуЛњЦїШЫДгвЛИіЮЛжУвЦЖЏЕНСэвЛИіЮЛжУЁЃ
ЁЁЁЁ3.ЙЄОпзјБъЯЕЃК
ЁЁЁЁЙЄОпзјБъЯЕЪЧвдЛњЦїШЫЗЈРМХЬЫљзАЙЄОпЕФгааЇЗНЯђЮЊZжсЃЌвдЙЄОп***ЕузїЮЊдЕуЫљЕУЕФзјБъЯЕЃЌЗНБуЕїЪдШЫдБЕїећЛњЦїШЫЮЛзЫЁЃ

ЁЁЁЁ4.ЙЄМўзјБъЯЕЃК
ЁЁЁЁЙЄМўзјБъЯЕЖЈвхСЫЙЄМўЯрЖдгкДѓЕизјБъЯЕЃЈЛђЦфЫќзјБъЯЕЃЉЕФЮЛжУЃЌЗНБуЕїЪдШЫдБЕїЪдБрГЬЁЃ
